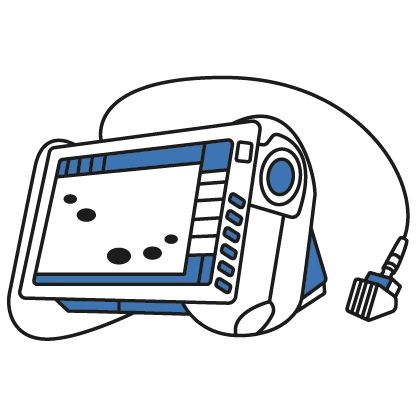
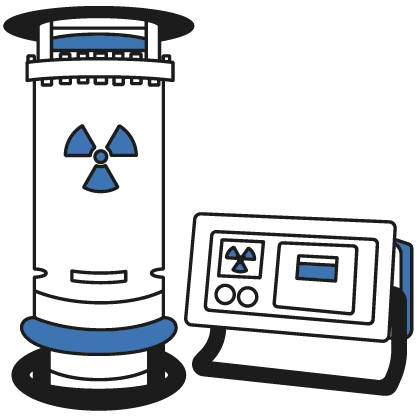





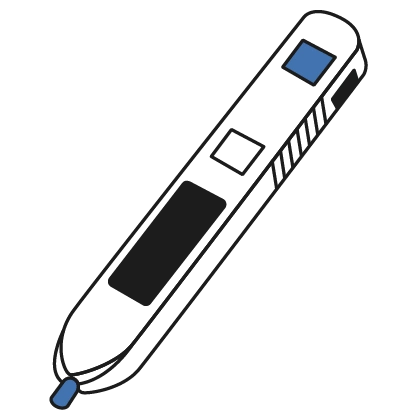


XRS-3T14 с встроенным рентгеновским аппаратом РАП-100 служит для высокоточного контроля сварных швов. С его помощью проводится рентгеновская проверка, позволяющая обнаруживать дефекты на ранних этапах без повреждения изделия.
Оборудование разработано для работы в помещениях с контролируемыми климатическими условиями — обеспечивающих обогрев, охлаждение и циркуляцию воздуха, что классифицируется как категория 4.
Конструктивные особенности
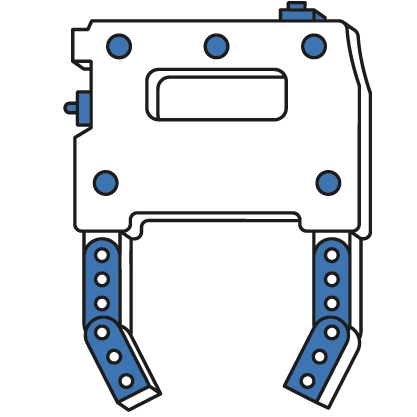
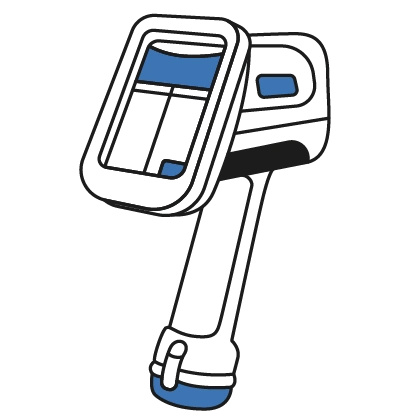
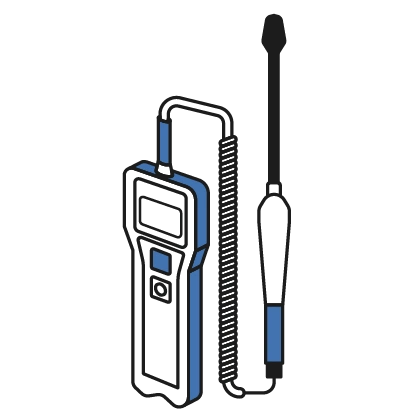
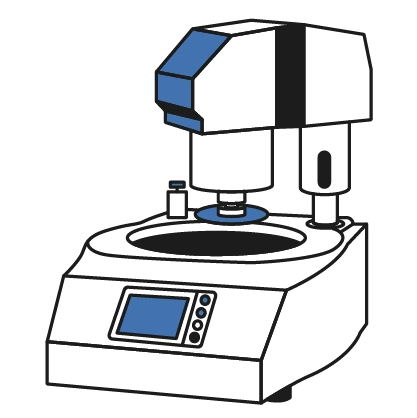
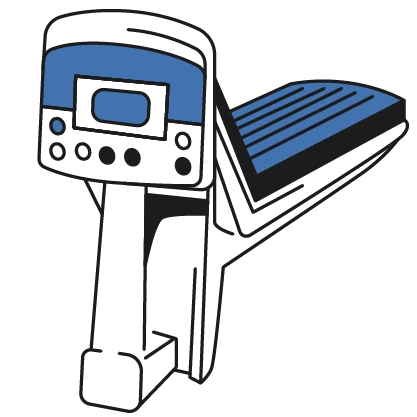
XRS-3T14 выступает как переносной штатив с встроенным манипулятором для оборудования, при помощи которого выполняется радиографическая оценка сварных швов. Микрофокусная трубка с выносным анодом обеспечивает точное позиционирование и обнаружение дефектов, а элементы управления позволяют плавно перемещать устройство в горизонтальной и вертикальной плоскости.
Механические приводы находятся под управлением цифрового контроллера, что гарантирует стабильность функционирования и повторяемость измерений. Лазерная система наведения с мишенями обеспечивает точное размещение проверяемых сварных стыков, что особенно важно при радиографическом обследовании.
Хотите узнать, как XRS-3T14 может улучшить качество проверки ваших сварных соединений? Получите бесплатную консультацию уже сейчас!
Комфорт эксплуатации
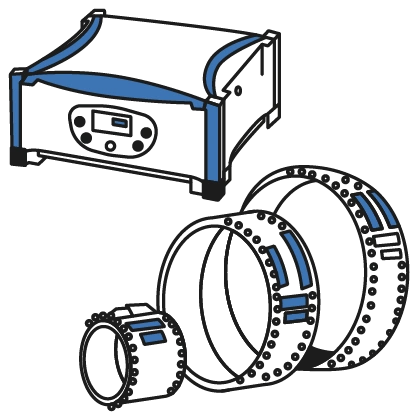
Аппарат можно контролировать как с помощью стационарного пульта, так и удалённо через радиоуправляемый ПДУ. Световая и звуковая сигнализация предупреждает о присутствии напряжения, обеспечивая безопасное взаимодействие оператора с устройством. Для облегчения перемещения комплекс оборудован роликовыми колесами с фиксаторами, а регулировочные опоры позволяют точно выставлять аппарат по уровню.
Заказать звонок